

























In dem Projekt soll ein Unterwassersystems zur Zustands- und Lageerfassung linearer und punktueller Infrastrukturkomponenten entwickelt und getestet werden.
Für den wirtschaftlichen Betrieb der Trinkwasserversorgung ist eine am Netzzustand orientierte Sanierung und Erneuerung der Wasserversorgungsanlagen von zentraler Bedeutung. Hierfür sind möglichst genaue Informationen über den Zustand der Anlagen essenziell. Dazu gehören auch in Gewässern verlegte Leitungen, wie Düker in Flüssen oder Rohwasserentnahmeleitungen. Da übliche von der Erdoberfläche einsetzbare Verfahren in Gewässern im Allgemeinen nicht einsetzbar sind, finden Untersuchungen aktuell nicht oder nur mit großem Aufwand, wie etwa durch die Inspektion mit Tauchern, statt.
Projektumfang
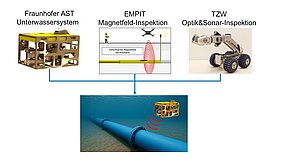
In Kooperation zwischen dem Fraunhofer IOSB-AST, der Firma EMPIT und dem TZW wird ein innovatives Unterwasserinspektionssystem entwickelt und unter realen Bedingungen getestet. Das System wird mit mehreren Sensoren ausgestattet, darunter ein speziell für den Unterwassereinsatz modifizierter CMI-Sensor von EMPIT zur Zustandsbewertung metallischer Werkstoffe, ein Sonar sowie optische Sensoren.
Das Fraunhofer IOSB-AST übernimmt die Entwicklung und Bereitstellung der Trägerplattform sowie die teilautonome Steuerung des Systems. Das TZW verantwortet die Projektkoordination, die Planung und Durchführung von Praxiseinsätzen bei Wasserversorgern, die Auswertung der optischen Daten sowie die Bewertung des Verfahrens im Hinblick auf dessen Einsatz im Asset Management.
Für die praktischen Untersuchungen stellen zwei Wasserversorger ihre Infrastruktur zur Verfügung: eine im Gewässer verlegte Transportleitung sowie eine Rohwasserleitung inklusive zugehörigem Entnahmebauwerk.
Systemanpassung
Im Rahmen eines ersten Vorversuchs wurde geprüft, ob die Transportleitung grundsätzlich für den Einsatz des CMI-Verfahrens (CMI - Current Magnetometry Inspection) geeignet ist und ob sich das Gewässer für eine Untersuchung mit einem teilautonomen Unterwasserinspektionsgerät eignet.
Die Anwendung des CMI-Verfahrens ergab, dass die Längsleitfähigkeit der Leitung nicht ausreicht, um die angelegte Spannung über eine ausreichende Strecke zu übertragen. Für eine erfolgreiche Durchführung des Verfahrens ist daher ein alternativer Anschlusspunkt erforderlich, da der ursprünglich vorgesehene nicht geeignet ist.
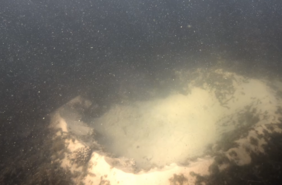
Mit dem ROV (Remotely Operated Vehicle) wurde eine erste Befahrung des Gewässers durchgeführt. Der vom Wasserversorger bereitgestellte digitale Leitungsverlauf wurde in die Steuerungssoftware des ROV integriert, und das Fahrzeug wurde manuell entlang des Verlaufs über den Gewässerboden gesteuert. Dabei zeigte sich, dass die Leitungen von einer Schlammschicht bedeckt waren, wodurch weder die Kamera noch das Sonar die Außenseite der Leitung erfassen konnten.
Trotz eingeschränkter Sicht ermöglichte die GPS-Navigation ein präzises Abfahren der Leitung. Dabei konnte eine Leckagestelle identifiziert werden: Das austretende Wasser verursachte eine deutliche Verwirbelung des Schlamms an der Gewässersohle. Die per GPS ermittelten Koordinaten der Leckage wurden dem Wasserversorger zur weiteren Bearbeitung und Reparatur übergeben.
Projektpartner
EMPIT ist ein weltweit tätiges Deep-Tech-Unternehmen, das sich auf die Inspektion und Kartierung von erdverlegten, nicht molchbaren Rohrleitungen spezialisiert hat. Mit der patentierten Current Magnetometry Inspection (CMI) bietet EMPIT eine einzigartige Lösung zur oberirdischen Zustandsbewertung solcher Leitungen. Für diese Innovation wurde das Unternehmen mit Deutschlands wichtigstem Innovationspreis ausgezeichnet.
Als wachstumsstarkes, unabhängiges Unternehmen trägt EMPIT zur sicheren und nachhaltigen Nutzung alternder Infrastruktur bei. Rund 50 % der heutigen Pipelines gelten als nicht begehbar – EMPIT ermöglicht deren zuverlässige Inspektion und schützt damit Anlagen, Personal, Öffentlichkeit und Umwelt.
Das Fraunhofer IOSB-AST in Ilmenau entwickelt seetaugliche Unterwasserrobotiksysteme für Exploration, Inspektion und Manipulation. Die Abteilung verfügt über langjährige Erfahrung in der Entwicklung autonomer Funktionen und KI-basierter Sensordatenauswertung für Unterwasserfahrzeuge, die in Bereichen wie Offshore-Windenergie, Meeresreinigung und Aquakultur eingesetzt werden.
Aktuell stehen zwei ferngesteuerte ROVs und ein autonomer AUV zur Verfügung. Dank offener Schnittstellen lassen sich Sensoren von Projektpartnern flexibel integrieren – unabhängig vom Entwicklungsstand.
Das TZW: DVGW-Technologiezentrum Wasser ist eine führende gemeinnützige Forschungseinrichtung für Wasserqualität, -sicherheit und -technologie mit Sitz in Karlsruhe und einer Außenstelle in Dresden. Als Teil des Deutschen Vereins des Gas- und Wasserfachs (DVGW) zählt das TZW zu den wichtigsten Kompetenzzentren der Wasserwirtschaft im deutschsprachigen Raum. Rund 200 Mitarbeitende arbeiten in interdisziplinären Teams an jährlich etwa 50 praxisnahen Forschungsprojekten.
Die Schwerpunkte liegen in Rohwasser- und Ressourcenschutz, Mikrobiologie, Spurenstoffanalytik, innovativen Aufbereitungsverfahren, Digitalisierung, Netzmanagement und Risikobewertung. Das TZW berät Wasserversorger, Behörden und Unternehmen und wirkt aktiv in Normungsgremien (DIN, CEN, DVGW) sowie internationalen Netzwerken wie GWRC, IWA, WaterEurope und EurEau.

